Foreword:
On the packaging production line of many products, these products must be quantitatively packed into carton boxes, and then the sealed carton boxes must be manually transported from the conveyor belt to the tray. From many industrial products to many daily necessities packaging boxes, The volume varies greatly, and each box weighs from a few kilograms to tens of kilograms. In order to adapt to these high-repetitive, high-strength, high-speed, and high-efficiency handling and palletizing tasks, Shenyang Rhein Mechanical and Electrical Co., Ltd. has designed and manufactured carton box handling and palletizing robots with different planning and work cycles for some users. The following is considered to be large Take a handling and palletizing robot designed and manufactured by a listed company as an example.
1. Project requirements1. Technical parameters
Single load ≤5KG, five boxes at one time, total weight ≤25KG at one time, box size has five specifications
Pallet size 1700*1700, 1500*1500
2. Work beat
The cartons are transported from the conveyor belt and stacked on the pallet at a rate of one box every 2 seconds. At least 25 boxes are palletized every minute
3. Palletizing requirements
The size of the cartons to be carried is different, and the stacking method on each layer of the pallet is different. The requirement for the stacking method is to place as many cartons as possible on each layer within the size of the pallet. The total height of the entire pallet after stacking is about 1900mm, around the pallet. The carton can only be stable, and it is necessary to ensure that it does not fall stably during transportation.
2. Design plan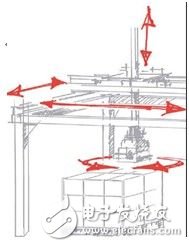
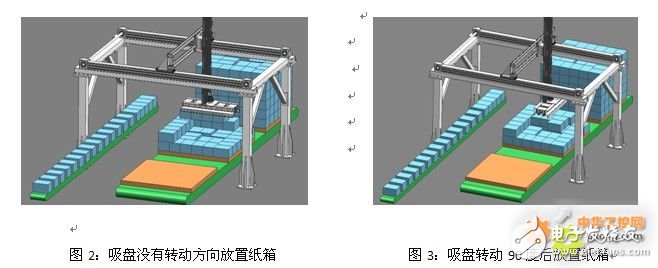
According to user requirements, the standardized and modularized three-dimensional handling and palletizing robot shown in Figure 2 and the suction cup gripper with arbitrary horizontal rotation are used to grab 4-5 cartons at a time. Since the gripper can rotate horizontally at will, The cartons can be placed on the pallet by turning 90 degrees or without turning the cartons as required. In addition, the upper carton and the lower carton are pressed against each other, so that the carton on the entire pallet is stable in the subsequent transportation.
1. Robot structure
Horizontal movement X axis: Two PAS43BB with an effective stroke of 2500mm are adopted,
Horizontal movement Y axis: Two PAS43BB with an effective stroke of 1800mm are adopted,
Up and down movement Z axis: adopt a LM-A43BB with an effective stroke of 1900mm,
2. Suction cup system
According to the air permeability, weight and handling speed of the carton, choose 4 suction cups as a group to suck 1 carton. A total of 5 groups of suction cups are needed to suck up to 5 cartons at a time. The 5 groups of suction cups can be independently controlled to achieve separate gripping. Split. For detailed information about suction cups, please contact Mr. Chen Shaobo from Shenyang Laiyin Electromechanical.
3. Control system
The palletizing robot adopts the host computer control system of PLC and touch screen, and drives the servo motor to control the robot's rapid and accurate positioning, control and function introduction of each part of the actuator:
Touch screen-PLC-servo motor-reducer-actuator
Signal detection-limit switches are installed at both ends of each axis, which have a certain protective effect on the robot;
4. Grabbing method and placement plan
According to different sizes of boxes, different placement schemes and orders are designed. The following picture shows an example:
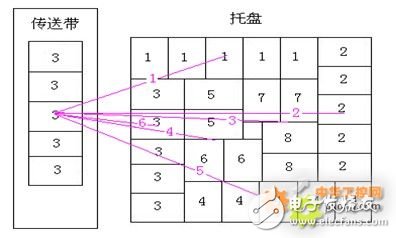
Grab 5 cartons at a time and place them on the pallet. The cartons marked 1, 2, 3 and 4 on the pallet in the picture were picked up at one time. When grabbing cartons of 5, 6, 7 and 8, you can grab 4 cartons at a time, first put down 2 cartons, then raise the claw a little and turn it 90 degrees before placing it on the adjacent position. The pallet is marked with 5, The cartons of 6, 7 and 8 were picked and placed twice.
5Successful application
According to different boxes, the actual design arrangement order
Optimize the movement beat
In the end, 5 boxes were placed in 10.4 seconds
Three, summary1. The matching of various links in the handling of cartons is very important
The suction force of the suction cup should be selected according to the weight, volume, handling method, handling speed, acceleration and deceleration value of the handling carton. The size, number of suction cups and position of the suction cup should be designed according to the specific use requirements. Especially in the process of handling and palletizing, it is necessary to give sufficient suction safety factor when rotating and turning over, to ensure that the cartons cannot produce small displacements during the handling process, and never allow the cartons to be unable to absorb or fall off during the handling process or between the suction cups Produce displacement.
2. Application results and prospects
Since 1996, Rhein Mechatronics has adopted Behella's standardized and modular products, and has installed and adjusted hundreds of similar 3D robots in turnkey projects. Standardized robots can use different grippers and fixtures, and are widely used in many small industrial parts, cosmetics, handicrafts, medicines, food, home appliances and other products to complete palletizing, packing, and feeding during the manufacturing, testing, and assembly processes. , Blanking, inspection, assembly, screwing, pressing, marking and other tasks.
Cable,Internet Cable,Tv Cable,The Cable
Dongguan Tuojun Electronic Technology Co., Ltd , https://www.fibercablessupplier.com