The ICP (IteraTIve Closest Point Iterative Close Point) algorithm is a point registration method based on contour features or point set versus point set as shown below.
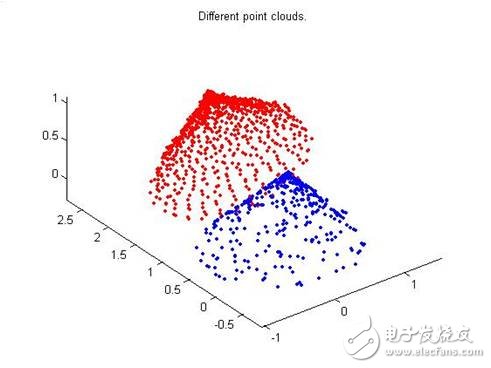
There are two sets of points, the red part and the blue part.
The ICP algorithm is to calculate how to rotate the PB, so that the PB and PR overlap as much as possible, and build a model. ICP is an optimization algorithm for improving the registration algorithm from the corresponding point set.
The corresponding point set registration algorithm assumes an ideal situation. A model point cloud data X (such as a blue point set) is rotated by a quaternion and translated to obtain a point cloud P (such as a red point set). The corresponding point set registration algorithm is mainly how to calculate qR and qT, knowing that these two can match the point cloud. However, the precondition for the corresponding point set registration algorithm is that the elements of the two point cloud data in the calculation correspond one-to-one. This condition is not likely to be a solid line due to errors in the reality, so there is an ICP algorithm.
The ICP algorithm first calculates the distance from each point on the source point cloud (blue part) to each point of the target point cloud (red part), so that each point matches the closest point of the target cloud, (remember this The mapping method is called full shot).
This satisfies the preconditions of the corresponding point set registration algorithm, and each point has a corresponding mapping point, which can be calculated according to the corresponding point set registration algorithm, but since this is a hypothesis, it is necessary to repeatedly run the above process until the mean square error The error is less than a certain threshold.
That is to say, for each iteration, the whole model is close to one point, and each time it re-finits the nearest point, and then counts it according to the corresponding point set approval algorithm, compares the mean square error, and continues iteration if it is not satisfied.

The main idea of ​​this algorithm is as follows:
The set of coordinate points of the reference point in the CT image coordinate system and the world coordinate system P = {Pi, i = 0, 1, 2, ..., k} and U = {Ui, i = 0, 1, 2, ..., n }. There is no need to have a one-to-one correspondence between U and P elements, and the number of elements does not have to be the same, and k ≥ n. The registration process is to find the rotation and translation transformation matrix between the two coordinate systems, so that the distance between the homologous points from U and P is the smallest. The process is as follows:
(1) Calculate the nearest point, that is, for each point in the set U, find the corresponding point closest to the point in the set P, and set the new point set consisting of these corresponding points in the set P as Q = {qi , i = 0,1,2,...,n}.
(2) Calculate the coordinates of the center of gravity of the two point sets Q and U, and perform point set centering to generate a new point set; calculate the positive definite matrix N from the new point set, and calculate the maximum eigenvalue of N and its maximum eigenvector ;
(3) The quaternion is converted into a rotation matrix R because the maximum eigenvector is equivalent to the rotation quaternion when the sum of squares of the residuals is the smallest; after the rotation matrix R is determined, the translation vector t is just two point sets. The difference in center of gravity can be determined by the center of gravity point and the rotation matrix in two coordinate systems; where R is the rotation matrix of 3&TImes;3, and T is the translation matrix of 3&TImes;1.
(3) Calculate the coordinate transformation, that is, for the set U, use the registration transformation matrix R, T for coordinate transformation to obtain a new point set U1, ie U1 = RU + T
(4) Calculate the root mean square error between U1 and Q. If it is less than the preset limit value ε, it ends. Otherwise, replace U with point set U1 and repeat the above steps.
Lithium Ion Battery,5G Integrated Battery,Custom Ups Lithium Ion Battery,Communication Ladder Backup Battery
Wolong Electric Group Zhejiang Dengta Power Source Co.,Ltd , https://www.wldtbattery.com